Initialization
The system initialization, i.e., the generation of the Initial Condition (IC), is of paramount importance, as it can significantly impact the performance and accuracy of the simulation. Several methods are offered in MoorDyn-C version 2, which can be concatenated to achieve the required accuracy at a minimum cost.
Note
As of now, only the catenary solver and the so-called Upscaled-drag dynamics method are available in MoorDyn-F.
Please refer to the V2 Input File documentation for further information on all the available options to control the system initialization.
Available initialization options:
Catenary solver
The catenary solver is always applied, regardless of which other initialization options are set, mainly because it has a very low performance cost. However, the catenary solver might fail to find a solution (in which case a straight-line profile is provided), or the accuracy of the solution might be insufficient.
The catenary solver is applied before any other initialization method.
Saved state
Usage:
---------------------- OPTIONS -----------------------------------------
lines.txt.ic fileIC Load a previously saved state
Right after the catenary solver, a previously saved system state can be loaded. The system state may be produced with MoorDyn-C version 2 itself or with other tools like MoorPy:
import moordyn
moordyn.moorpy_ic("Mooring/lines.txt", outfile="Mooring/lines.txt.ic")
Warning
Although MoorPy is intended to be 100% compatible with MoorDyn, it is still in development, and some features, like rods, are not yet available.
For the sake of the lines, MoorPy internally uses the same catenary solver described above. However, other entities like free points, bodies, and rods are also solved, producing a refined solution with a very low computational cost.
Otherwise, saving the state with MoorDyn-C version 2 can be used to concatenate system initialization methods, taking advantage of the strengths of each model.
Below an example is provided.
Upscaled-drag dynamics
Usage:
---------------------- OPTIONS -----------------------------------------
ICgenDynamic 1 IC generated by the legacy upscaled-drag dynamics
CdScaleIC 5 The drag upscaling factor during the IC generation
This method involves running a regular simulation with all the coupled entities fixed, and the drag coefficients upscaled by the CdScaleIC factor.
Given that some system velocity is retained, this method is mainly beneficial when either the time step is very small or the catenary solver failed to find a good initial line profile. Even with a substantial upscaled-drag factor, the dissipation process can be slow, leading to extended times for velocity reduction and convergence.
Stationary solver
Usage:
---------------------- OPTIONS -----------------------------------------
ICgenDynamic 0 IC generated by the stationary solver
The stationary solver also carries out a simulation with all the coupled entities fixed. However, in this simulation, the velocity of each system component is nullified at the beginning of each step, leaving acceleration as the only driving force for the system’s evolution.
Thus, the stationary solver can be considered the limit of the upscaled-drag dynamics for an infinitely large CdScaleIC factor. It should be noted, however, that a too-large CdScaleIC factor when using upscaled-drag dynamics may result in a divergent simulation.
This method can produce more accurate results than upscaled-drag dynamics. On the other hand, if the initial system profile is significantly deviated from the final solution, this method may require very long simulations to converge.
An initialization practical application
As discussed above, each IC generation method has its strengths and weaknesses. In simple applications, either the upscaled-drag dynamics or the stationary solver is usually sufficient. However, if initialization is a critical part or the system is complex, concatenating IC generation methods can be very beneficial.
To illustrate this, consider the following system example:
A complex system which is hard to initialize
------------------------- LINE TYPES --------------------------------------------------
LineType Diam MassDenInAir EA BA/-zeta EI Can Cat Cdn Cdt
(-) (m) (kg/m) (N) (Pa-s/-) (n-m^2) (-) (-) (-) (-)
cable 0.116 25 362e6 -1.0 38e3 1.0 0.0 1.1 0.008
bouyancy 0.361 59 362e6 -1.0 38e3 1.0 0.469 2.617 0.345
nylon 0.116 25 362e6 -1.0 38e3 1.0 0.0 1.1 0.008
---------------------- ROD TYPES ------------------------------------
TypeName Diam Mass/m Cd Ca CdEnd CaEnd
(name) (m) (kg/m) (-) (-) (-) (-)
conn 0.116 25 1.1 1.0 1.1 1.0
conn_stiff 0.116 25 1.1 1.0 1.1 1.0
clamp 0.116 25 1.2 1.0 1.2 1.0
---------------------------- BODIES -----------------------------------------------------
ID Attachment X0 Y0 Z0 r0 p0 y0 Mass CG* I* Volume CdA* Ca
(#) (-) (m) (m) (m) (deg) (deg) (deg) (kg) (m) (kg-m^2) (m^3) (m^2) (-)
1 Free 452.0 0 -313.0 0 0 0 29.5 0 0.098 0.014 0.5|0.5 1.0
---------------------- RODS ----------------------------------------
ID RodType Attachment Xa Ya Za Xb Yb Zb NumSegs RodOutputs
(#) (name) (#/key) (m) (m) (m) (m) (m) (m) (-) (-)
1 clamp Body1 0.1 0 0.0 -0.1 0 0.0 1 -
2 conn Free 375.0 0 -250.0 375.0 0 -250.0 0 -
3 conn Free 290.0 0 -215.0 290.0 0 -215.0 0 -
----------------------- POINTS ----------------------------------------------
Node Type X Y Z M V CdA CA
(-) (-) (m) (m) (m) (kg) (m^3) (m^2) (-)
1 Fixed 600.0 0 -320.0 0 0 0 0
2 Fixed 452.0 0 -320.0 0 0 0 0
3 Body1 0.0 0 0.0 0 0 0 0
4 Coupled 0.0 0 -63.6 0 0 0 0
-------------------------- LINES -------------------------------------------------
Line LineType NodeA NodeB UnstrLen NumSegs Flags/Outputs
(-) (-) (-) (-) (m) (-) (-)
1 nylon 2 3 7.0 1 -
2 cable 1 R1A 150.0 15 -
3 cable R1B R2A 110.0 11 -
4 bouyancy R2B R3A 80.0 8 -
5 cable R3B 4 340.0 34 -
-------------------------- SOLVER OPTIONS---------------------------------------------------
3.0e6 kb - bottom stiffness
3.0e5 cb - bottom damping
320 WtrDpth - water depth
midpoint5 tScheme - Time integrator
0.2 cfl - Courant-Friedich-Lewy factor
0 ICgenDynamic - 0 for stationary solver, 1 for upscaled drag legacy solver
4.0 ICDfac - factor by which to scale drag coefficients during dynamic relaxation IC gen
1e-4 threshIC - threshold for IC convergence
1.0 dtIC - Time lapse between convergence tests (s)
25.0 TmaxIC - threshold for IC convergence
--------------------------- need this line -------------------------------------------------
We can try the three initialization methods: the catenary solver alone, the stationary solver, or the upscaled-drag dynamics, by simply adjusting the options at the end of the file (only the modified options are documented):
Catenary solver alone
-------------------------- SOLVER OPTIONS---------------------------------------------------
0.0 TmaxIC - threshold for IC convergence
--------------------------- need this line -------------------------------------------------
Stationary solver
-------------------------- SOLVER OPTIONS---------------------------------------------------
1e-6 threshIC - threshold for IC convergence
100.0 TmaxIC - threshold for IC convergence
--------------------------- need this line -------------------------------------------------
Upscaled-drag dynamics
-------------------------- SOLVER OPTIONS---------------------------------------------------
0.05 cfl - Courant-Friedich-Lewy factor
1 ICgenDynamic - 0 for stationary solver, 1 for upscaled drag legacy solver
1e-6 threshIC - threshold for IC convergence
100.0 TmaxIC - threshold for IC convergence
--------------------------- need this line -------------------------------------------------
It’s important to note that for the upscaled-drag dynamics to work effectively, the time step must be significantly reduced, which increases the computational cost.
The following figure illustrates the three solutions (Black: Catenary solver; Red: Stationary solver; Blue: Upscaled-drag dynamics):
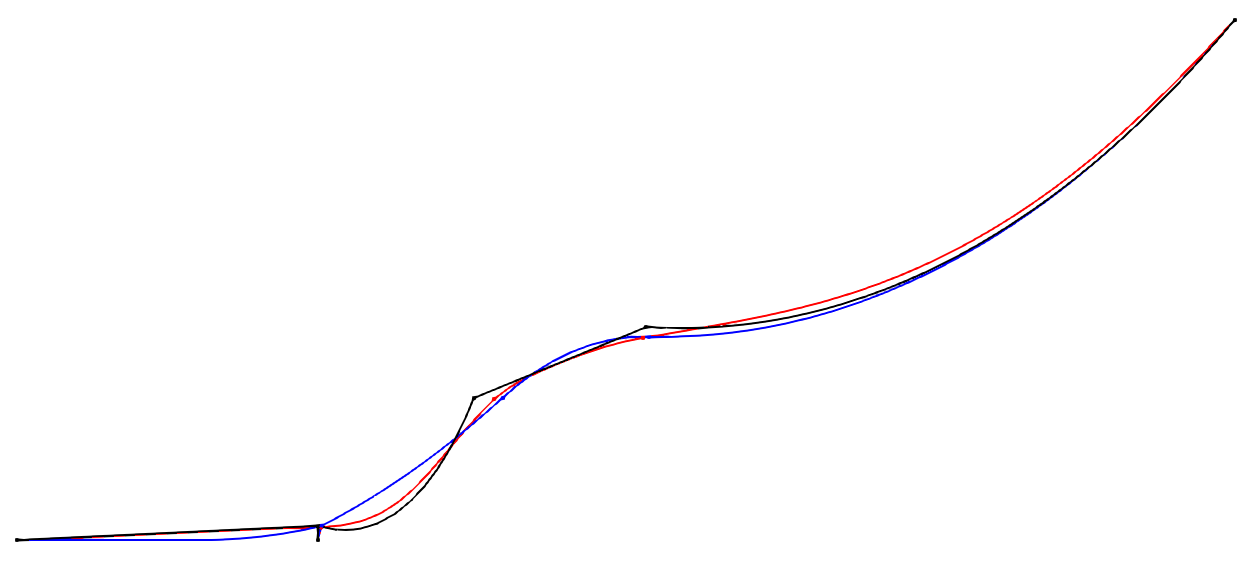
As shown, the catenary solver failed to provide an accurate enough initial system state, which hampered the performance of the stationary solver. After 100 seconds, the stationary solver still hadn’t converged to the correct solution.
In contrast, the upscaled-drag dynamics converged to a satisfactory solution, albeit with a significant reduction in the time step.
A practical approach would be to combine the stationary solver and the upscaled-drag dynamics to achieve an accurate IC with relatively low computational cost, without compromising the subsequent simulation. To do this, we can create three versions of the input file: one for the initial stationary solver, another for the upscaled-drag dynamics IC generation, and a final one for the actual simulation (only the relevant options are documented):
riser_ic1.txt: The system boot up with the stationary solver
-------------------------- SOLVER OPTIONS---------------------------------------------------
0.25 cfl - Courant-Friedich-Lewy factor
0 ICgenDynamic - 0 for stationary solver, 1 for upscaled drag legacy solver
4.0 ICDfac - factor by which to scale drag coefficients during dynamic relaxation IC gen
1e-3 threshIC - threshold for IC convergence
0.5 dtIC - Time lapse between convergence tests (s)
2.0 TmaxIC - threshold for IC convergence
--------------------------- need this line -------------------------------------------------
riser_ic2.txt: The upscaled-drag to fast converge to a good enough IC
-------------------------- SOLVER OPTIONS---------------------------------------------------
0.25 cfl - Courant-Friedich-Lewy factor
1 ICgenDynamic - 0 for stationary solver, 1 for upscaled drag legacy solver
4.0 ICDfac - factor by which to scale drag coefficients during dynamic relaxation IC gen
1e-3 threshIC - threshold for IC convergence
0.5 dtIC - Time lapse between convergence tests (s)
5.0 TmaxIC - threshold for IC convergence
riser.ic fileIC - Load a quasistatic solution before the IC solver (-)
--------------------------- need this line -------------------------------------------------
riser.txt: The riser actual simulation
-------------------------- SOLVER OPTIONS---------------------------------------------------
0.5 cfl - Courant-Friedich-Lewy factor
0 ICgenDynamic - 0 for stationary solver, 1 for upscaled drag legacy solver
4.0 ICDfac - factor by which to scale drag coefficients during dynamic relaxation IC gen
1e-3 threshIC - threshold for IC convergence
1.0 dtIC - Time lapse between convergence tests (s)
1.0 TmaxIC - threshold for IC convergence
riser.ic fileIC - Load a quasistatic solution before the IC solver (-)
--------------------------- need this line -------------------------------------------------
Below is a Python code snippet to execute the simulation:
import moordyn
# 1st IC generation stage: The stationary solver
system = moordyn.Create("riser_ic1.txt")
point = moordyn.GetPoint(system, 4)
r = moordyn.GetPointPos(point)
v = [0, 0, 0]
moordyn.Init(system, r, v)
moordyn.SaveState(system, "riser.ic")
moordyn.Close(system)
# 2nd IC generation stage: The dynamic solver
system = moordyn.Create("riser_ic2.txt")
point = moordyn.GetPoint(system, 4)
r = moordyn.GetPointPos(point)
moordyn.Init(system, r, v)
moordyn.SaveState(system, "riser.ic")
moordyn.Close(system)
# The simulation itself
system = moordyn.Create("riser.txt")
point = moordyn.GetPoint(system, 4)
r = moordyn.GetPointPos(point)
moordyn.Init(system, r, v)
T = 10
A = 0.0
dt = T / 100
t = 0.0
step = 0
while t <= 1 * T:
rorg = moordyn.GetPointPos(point)
rdst = list(rorg)
rdst[2] = r[2] + A * math.sin(2 * math.pi * (t + dt) / T)
v = [(rdst[i] - rorg[i]) / dt for i in range(len(rorg))]
moordyn.Step(system, rorg, v, t, dt)
try:
moordyn.SaveVTK(system, f"vtk/out.{step:05d}.vtm")
except:
pass
t += dt
step += 1
moordyn.Close(system)
In this script, the system first loads the riser_ic1.txt input file, runs
the stationary solver, and saves the resulting state, which is then loaded by
the riser_ic2.txt simulation to run the upscaled-drag simulation.
The final state is saved once more and used by the actual simulation input
file, riser.txt.
As a result, the IC is generated in just 7 seconds with a CFL value of 0.25. This IC is sufficiently accurate to enable a stable simulation with a CFL of 0.5, leading to a significant improvement in performance.