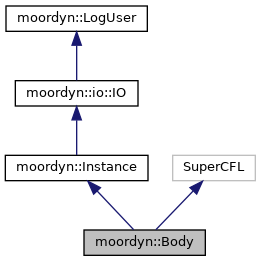
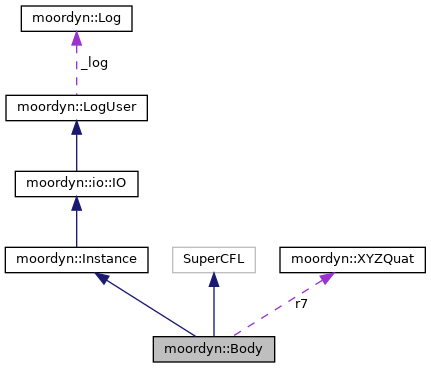
A rigid body. More...
#include <Body.hpp>
Public Types | |
| enum | types { COUPLED = -1 , FREE = 0 , FIXED = 1 , CPLDPIN = 2 , VESSEL = COUPLED , ANCHOR = FIXED } |
| Types of bodies. More... | |
Public Member Functions | |
| Body (moordyn::Log *log, size_t id) | |
| Costructor. More... | |
| ~Body () | |
| Destructor. | |
| void | setup (int number, types type, vec6 r6, vec rCG, real M, real V, vec I, vec6 CdA, vec6 Ca, EnvCondRef env_in, shared_ptr< ofstream > outfile) |
| Setup/initialize a rigid body. Called after instantiating a new Body in MoorDyn2.cpp. More... | |
| void | addPoint (moordyn::Point *point, vec coords) |
| Attach a point to the body. More... | |
| void | addRod (Rod *rod, vec6 coords) |
| Attach a rod to the body. More... | |
| void | initializeUnfreeBody (vec6 r=vec6::Zero(), vec6 rd=vec6::Zero(), vec6 rdd=vec6::Zero()) |
| Initialize the body that aren't free i.e. don't have states. More... | |
| vec6 | getUnfreeVel () const |
| Get the last setted velocity for an unfree body. More... | |
| void | initializeBody (XYZQuat r=XYZQuat::Zero(), vec6 rd=vec6::Zero()) |
| Initialize the free body. More... | |
| void | setWaves (moordyn::WavesRef waves_in) |
| Set the environmental data. More... | |
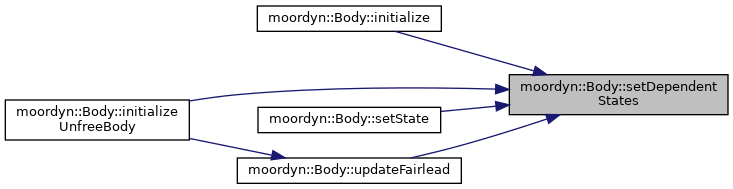
| void | setDependentStates () |
| set the states (positions and velocities) to all the attached entities More... | |
| void | getState (XYZQuat &pos, vec6 &vel) const |
| Get the body kinematics. More... | |
| std::pair< XYZQuat, vec6 > | getState () const |
| Get the body kinematics. More... | |
| const vec | getPosition () const |
| Get the body position. More... | |
| const vec | getAngles () const |
| Get the body Euler XYZ angles. More... | |
| const vec | getVelocity () const |
| Get the body velocity. More... | |
| const vec | getAngularVelocity () const |
| Get the body angular velocity. More... | |
| const vec6 | getFnet () const |
| Get the forces and moments exerted over the body. More... | |
| const mat6 & | getM () const |
| Get the mass and intertia matrix. More... | |
| real | GetBodyOutput (OutChanProps outChan) |
| Get body output. More... | |
| void | scaleDrag (real scaler) |
| Scale the drag coefficients. More... | |
| void | initiateStep (vec6 r, vec6 rd, vec6 rdd) |
| Called at the beginning of each coupling step to update the boundary conditions (body kinematics) for the proceeding time steps. More... | |
| void | updateFairlead (real time) |
| Sets the kinematics based on the position and velocity of the fairlead. More... | |
| std::pair< XYZQuat, vec6 > | initialize () |
| Initialize a free instance. More... | |
| void | initialize (InstanceStateVarView r) |
| Initialize a free instance. More... | |
 Public Member Functions inherited from moordyn::Instance Public Member Functions inherited from moordyn::Instance | |
| Instance (moordyn::Log *log) | |
| Costructor. More... | |
| virtual | ~Instance ()=default |
| Destructor. | |
| const size_t | id () const |
| Get the unique identifier of this instance. More... | |
| Public Member Functions inherited from moordyn::io::IO | |
| IO (moordyn::Log *log) | |
| Costructor. More... | |
| virtual | ~IO ()=default |
| Destructor. | |
| void | Save (const std::string filepath) |
| Save the entity into a file. More... | |
| void | Load (const std::string filepath) |
| Loads the entity from a file. More... | |
| Public Member Functions inherited from moordyn::LogUser | |
| LogUser (Log *log=NULL) | |
| Constructor. More... | |
| ~LogUser () | |
| Destructor. | |
| void | SetLogger (Log *log) |
| Set the log handler. More... | |
| Log * | GetLogger () const |
| Get the log handler. More... | |
Static Public Member Functions | |
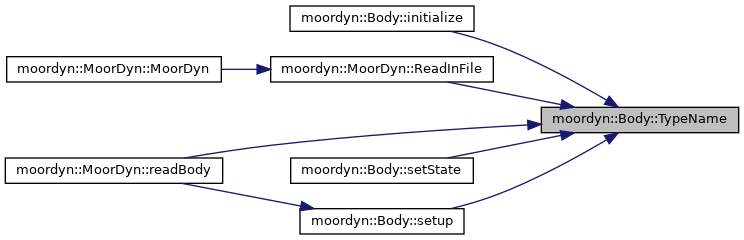
| static string | TypeName (types t) |
| Return a string with the name of a type. More... | |
Public Attributes | |
| EnvCondRef | env |
| Global struct that holds environmental settings. | |
| WavesRef | waves |
| global Waves object | |
| std::vector< moordyn::Point * > | attachedP |
| Points attached to this body. | |
| std::vector< Rod * > | attachedR |
| Rods attached to this body. | |
| std::vector< vec > | rPointRel |
| Attachment points of each point. | |
| std::vector< vec6 > | r6RodRel |
| Attachment points of each rod. | |
| vec6 | body_r6 |
| The reference point. | |
| vec | body_rCG |
| The center of gravity. | |
| real | bodyM |
| The mass. | |
| real | bodyV |
| The volume. | |
| vec | bodyI |
| The inertia diagonal components. | |
| vec6 | bodyCdA |
| The product of the drag coefficient and the frontal area (m^2) | |
| vec6 | bodyCa |
| The added mass coefficients. | |
| XYZQuat | r7 |
| body 6dof position [x/y/z] | |
| vec6 | v6 |
| body 6dof velocity[x/y/z] | |
| vec6 | a6 |
| body 6dof acceleration[x/y/z] | |
| vec6 | r_ves |
| fairlead position for coupled bodies [x/y/z] | |
| vec6 | rd_ves |
| fairlead velocity for coupled bodies [x/y/z] | |
| vec6 | rdd_ves |
| fairlead acceleration for coupled bodies [x/y/z] | |
| vec6 | F6net |
| total force and moment vector on body | |
| mat6 | M |
| total body mass + added mass matrix including all elements | |
| mat6 | M0 |
| mat | OrMat |
| ofstream * | outfile |
| Pointer to moordyn::MoorDyn::outfileMain. | |
| size_t | bodyId |
| Body ID. | |
| int | number |
| Body number. | |
| types | type |
| Type of body. | |
| void | setState (const InstanceStateVarView r) |
| Set the states to the body to the position r and velocity rd. More... | |
| void | getStateDeriv (InstanceStateVarView drdt) |
| calculate the forces and state derivatives of the body More... | |
| void | doRHS () |
| calculates the forces on the body More... | |
| void | Output (real time) |
| const size_t | stateN () const |
| Get the number of state variables required by this instance. More... | |
| const size_t | stateDims () const |
| Get the dimension of the state variable. More... | |
| std::vector< uint64_t > | Serialize (void) |
| Produce the packed data to be saved. More... | |
| uint64_t * | Deserialize (const uint64_t *data) |
| Unpack the data to restore the Serialized information. More... | |
| void | saveVTK (const char *filename) |
| Save the body on a VTK (.vtp) file. More... | |
| const leanvtk::VTPWriter * | getVTK () const |
| Get the VTK writer. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from moordyn::io::IO | |
| ofstream | MakeFile (const std::string filepath) const |
| Create an output file and write the MoorDyn magic header. More... | |
| std::tuple< uint64_t, uint64_t * > | LoadFile (const std::string filepath) const |
| Open an input file and load the data. More... | |
| uint64_t | Serialize (const uint64_t &i) |
| Pack an unsigned integer to make it writable. More... | |
| uint64_t | Serialize (const int64_t &i) |
| Pack an integer to make it writable. More... | |
| uint64_t | Serialize (const real &f) |
| Pack a float to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const vec &m) |
| Pack a 3D vector to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const vec6 &m) |
| Pack a 6D vector to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const mat &m) |
| Pack a 3x3 matrix to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const mat6 &m) |
| Pack a 6x6 matrix to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const quaternion &m) |
| Pack a quaternion to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const XYZQuat &m) |
| Pack an XYZQuat to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const std::vector< real > &l) |
| Pack a list of floating point numbers to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const std::vector< vec > &l) |
| Pack a list of 3D vectors to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const std::vector< vec6 > &l) |
| Pack a list of 6D vectors to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const std::vector< mat > &l) |
| Pack a list of 3x3 matrices to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const std::vector< mat6 > &l) |
| Pack a list of 6x6 matrices to make it writable. More... | |
| std::vector< uint64_t > | Serialize (const Eigen::Matrix< real, Eigen::Dynamic, Eigen::Dynamic > &l) |
| Pack an arbitrarily large matrix. More... | |
| template<typename T > | |
| std::vector< uint64_t > | Serialize (const std::vector< std::vector< T >> &l) |
| Pack a list of lists to make it writable This function might act recursively. More... | |
| uint64_t * | Deserialize (const uint64_t *in, uint64_t &out) |
| Unpack a loaded unsigned integer. More... | |
| uint64_t * | Deserialize (const uint64_t *in, int64_t &out) |
| Unpack a loaded integer. More... | |
| uint64_t * | Deserialize (const uint64_t *in, real &out) |
| Unpack a loaded floating point number. More... | |
| uint64_t * | Deserialize (const uint64_t *in, vec &out) |
| Unpack a loaded 3D vector. More... | |
| uint64_t * | Deserialize (const uint64_t *in, vec6 &out) |
| Unpack a loaded 6D vector. More... | |
| uint64_t * | Deserialize (const uint64_t *in, mat &out) |
| Unpack a loaded 3x3 matrix. More... | |
| uint64_t * | Deserialize (const uint64_t *in, mat6 &out) |
| Unpack a loaded 6x6 matrix. More... | |
| uint64_t * | Deserialize (const uint64_t *in, quaternion &out) |
| Unpack a loaded quaternion. More... | |
| uint64_t * | Deserialize (const uint64_t *in, XYZQuat &out) |
| Unpack a loaded XYZQuat. More... | |
| uint64_t * | Deserialize (const uint64_t *in, std::vector< real > &out) |
| Unpack a loaded list of floating point numbers. More... | |
| uint64_t * | Deserialize (const uint64_t *in, std::vector< vec > &out) |
| Unpack a loaded list of 3D vectors. More... | |
| uint64_t * | Deserialize (const uint64_t *in, std::vector< vec6 > &out) |
| Unpack a loaded list of 6D vectors. More... | |
| uint64_t * | Deserialize (const uint64_t *in, std::vector< mat > &out) |
| Unpack a loaded list of 3x3 matrices. More... | |
| uint64_t * | Deserialize (const uint64_t *in, std::vector< mat6 > &out) |
| Unpack a loaded list of 6x6 matrices. More... | |
| uint64_t * | Deserialize (const uint64_t *in, Eigen::Matrix< real, Eigen::Dynamic, Eigen::Dynamic > &out) |
| Unpack an arbitrarily large matrix. More... | |
| template<typename T > | |
| uint64_t * | Deserialize (const uint64_t *in, std::vector< std::vector< T >> &out) |
| Unpack a loaded list of lists. More... | |
| Protected Attributes inherited from moordyn::LogUser | |
| Log * | _log |
| The log handler. | |
Detailed Description
A rigid body.
Some really basic dynamics are implemented for rigid bodies out of the box, which can be extended through the usage of coupled ones.
In the configuration file the options are:
Name/ID, X0, Y0, Z0, Xcg, Ycg, Zcg, M, V, IX, IY, IZ, CdA-x,y,z Ca-x,y,z
Member Enumeration Documentation
◆ types
| enum moordyn::Body::types |
Types of bodies.
| Enumerator | |
|---|---|
| COUPLED | Is coupled, i.e. is controlled by the user. |
| FREE | Is free to move, controlled by MoorDyn. |
| FIXED | Is fixed, either to a location or to another moving entity. |
| CPLDPIN | Is coupled pinned, i.e. translational dof are controlled by the user. |
Constructor & Destructor Documentation
◆ Body()
| moordyn::Body::Body | ( | moordyn::Log * | log, |
| size_t | id | ||
| ) |
Costructor.
- Parameters
-
log Logging handler defining where/how results should be logged. id U nique identifier of this body
Member Function Documentation
◆ addPoint()
| void moordyn::Body::addPoint | ( | moordyn::Point * | point, |
| vec | coords | ||
| ) |
Attach a point to the body.
- Parameters
-
point The point coords The fixation point
- Exceptions
-
moordyn::invalid_value_error If pointis NULL
◆ addRod()
Attach a rod to the body.
- Parameters
-
rod The rod coords vector indicating start (vals 0-2) and end (valse 3-5) of rod in the body reference frame
- Exceptions
-
moordyn::invalid_value_error If rodis NULL

◆ Deserialize()
|
virtual |
Unpack the data to restore the Serialized information.
This is the inverse of Serialize(void)
- Parameters
-
data The packed data
- Returns
- A pointer to the end of the file, for debugging purposes
Implements moordyn::io::IO.

◆ doRHS()
| void moordyn::Body::doRHS | ( | ) |
calculates the forces on the body
- Exceptions
-
moordyn::invalid_value_error If the body is of type moordyn::Body::FREE


◆ getAngles()
|
inline |
Get the body Euler XYZ angles.
- Returns
- The body Euler XYZ angles
◆ getAngularVelocity()
|
inline |
Get the body angular velocity.
- Returns
- The body angular velocity
◆ GetBodyOutput()
| real moordyn::Body::GetBodyOutput | ( | OutChanProps | outChan | ) |
Get body output.
This funtion is useful when output options are set in the system
- Parameters
-
outChan The output channel/field
- Returns
- The output value, 0.0 if a non-valid field is set

◆ getFnet()
| const vec6 moordyn::Body::getFnet | ( | ) | const |
Get the forces and moments exerted over the body.
- Returns
- The net force

◆ getM()
|
inline |
Get the mass and intertia matrix.
- Returns
- The mass and inertia matrix
◆ getPosition()
|
inline |
Get the body position.
- Returns
- The body position
◆ getState() [1/2]
Get the body kinematics.
- Returns
- Position and velocity
◆ getState() [2/2]
Get the body kinematics.
- Parameters
-
pos The output position vel The output velocity
◆ getStateDeriv()
|
virtual |
calculate the forces and state derivatives of the body
This function is only meant for free bodies
- Parameters
-
drdt The states derivatives, i.e. the velocity and the acceleration
- Exceptions
-
moordyn::invalid_value_error If the body is of type moordyn::Body::FREE
Implements moordyn::Instance.

◆ getUnfreeVel()
|
inline |
Get the last setted velocity for an unfree body.
For free bodies the behaviour is undetermined
- Returns
- The velocity (6 dof)
◆ getVelocity()
|
inline |
Get the body velocity.
- Returns
- The body velocity
◆ getVTK()
|
inline |
Get the VTK writer.
This function is useful for writing multiblock .vtm files
- Returns
- The VTK .vtu writer
◆ initialize() [1/2]
Initialize a free instance.
- Parameters
-
r The output state variable
- Returns
- The 6-dof position (first) and the 6-dof velocity (second)
- Exceptions
-
moordyn::invalid_value_error If the instance does not have free states. e.g. a coupled body controlled from outside moordyn::output_file_error If an outfile has been provided, but it cannot be written

◆ initialize() [2/2]
|
inlinevirtual |
Initialize a free instance.
- Parameters
-
r The output state variable
- Exceptions
-
moordyn::invalid_value_error If the instance does not have free states. e.g. a coupled body controlled from outside
Implements moordyn::Instance.
◆ initializeBody()
Initialize the free body.
Those are the bodies with type moordyn::Body::FREE
- Parameters
-
r The position (6 dof) rd The velocity (6 dof)
- Exceptions
-
moordyn::invalid_value_error If the body is not of type moordyn::Body::FREE moordyn::output_file_error If an outfile has been provided, but it cannot be written
◆ initializeUnfreeBody()
| void moordyn::Body::initializeUnfreeBody | ( | vec6 | r = vec6::Zero(), |
| vec6 | rd = vec6::Zero(), |
||
| vec6 | rdd = vec6::Zero() |
||
| ) |
Initialize the body that aren't free i.e. don't have states.
Those are the bodies with types moordyn::Body::COUPLED and moordyn::Body::FIXED
- Parameters
-
r The position (6 dof) rd The velocity (6 dof) rdd The acceleration (6 dof)
- Exceptions
-
moordyn::invalid_value_error If the body is of type moordyn::Body::FREE

◆ initiateStep()
Called at the beginning of each coupling step to update the boundary conditions (body kinematics) for the proceeding time steps.
- Parameters
-
r The input position rd The input velocity rdd The input acceleration
- Exceptions
-
moordyn::invalid_value_error If the body is not of type moordyn::Body::COUPLED or moordyn::Body::FIXED

◆ saveVTK()
| void moordyn::Body::saveVTK | ( | const char * | filename | ) |
Save the body on a VTK (.vtp) file.
- Parameters
-
filename The output file name
- Exceptions
-
output_file_error If the file cannot be saved
◆ scaleDrag()
|
inline |
Scale the drag coefficients.
- Parameters
-
scaler The drag coefficients scale factor
◆ Serialize()
|
virtual |
Produce the packed data to be saved.
The produced data can be used afterwards to restore the saved information afterwards calling Deserialize(void).
Thus, this function is not processing the information that is extracted from the definition file
- Returns
- The packed data
Implements moordyn::io::IO.

◆ setDependentStates()
| void moordyn::Body::setDependentStates | ( | ) |
set the states (positions and velocities) to all the attached entities
- Exceptions
-
moordyn::invalid_value_error If a non FIXED point is tried to be edited

◆ setState()
|
virtual |
Set the states to the body to the position r and velocity rd.
- Parameters
-
r The body state
Implements moordyn::Instance.

◆ setup()
| void moordyn::Body::setup | ( | int | number, |
| types | type, | ||
| vec6 | r6, | ||
| vec | rCG, | ||
| real | M, | ||
| real | V, | ||
| vec | I, | ||
| vec6 | CdA, | ||
| vec6 | Ca, | ||
| EnvCondRef | env_in, | ||
| shared_ptr< ofstream > | outfile | ||
| ) |
Setup/initialize a rigid body. Called after instantiating a new Body in MoorDyn2.cpp.
- Parameters
-
number Body number type Body type r6 6dof position rCG Center of gravity position M Mass V Volume I Inertia (diagonal matrix components) CdA Drag coefficient Ca Added mass coefficient env_in Global struct that holds environmental settings outfile The outfile where information shall be witten


◆ setWaves()
|
inline |
Set the environmental data.
- Parameters
-
waves_in Global Waves object
◆ stateDims()
|
inlinevirtual |
Get the dimension of the state variable.
- Returns
- 7 components for position quaternion and 6 components for linear and angular velocities, i.e. 13 components
- Warning
- This function shall be called after ::setup()
Reimplemented from moordyn::Instance.
◆ stateN()
|
inlinevirtual |
Get the number of state variables required by this instance.
- Returns
- 1
Reimplemented from moordyn::Instance.
◆ TypeName()
|
inlinestatic |
Return a string with the name of a type.
This tool is useful mainly for debugging
◆ updateFairlead()
| void moordyn::Body::updateFairlead | ( | real | time | ) |
Sets the kinematics based on the position and velocity of the fairlead.
This function is meant only for coupled or fixed bodies
- Parameters
-
time Local time within the time step (from 0 to dt)
- Exceptions
-
moordyn::invalid_value_error If the body is not of type moordyn::Body::COUPLED or moordyn::Body::FIXED


Member Data Documentation
◆ M0
| mat6 moordyn::Body::M0 |
starting mass and added mass matrix (6x6) of body without any rod elements in inertial orientation
◆ OrMat
| mat moordyn::Body::OrMat |
orientation matrix of body (rotation matrix that gets it to its current orientation)
The documentation for this class was generated from the following files:
- /home/docs/checkouts/readthedocs.org/user_builds/moordyn/checkouts/latest/source/Body.hpp
- /home/docs/checkouts/readthedocs.org/user_builds/moordyn/checkouts/latest/source/Body.cpp