MoorDyn2 C++ API namespace. More...
Classes | |
| class | Body |
| A rigid body. More... | |
| class | Instance |
| A generic instance. More... | |
| class | Line |
| A mooring line. More... | |
| class | null_out_buf |
| Null buffer to avoid printing on screen. More... | |
| class | MultiStream |
| Streamer able to redirect the output to several substreams. More... | |
| class | Log |
| A Logging utility. More... | |
| class | LogUser |
| A helper for the entities to use the logger. More... | |
| struct | XYZQuat |
| Joint of a point and a quaternion. More... | |
| struct | _FailProps |
| Failure conditions. More... | |
| class | MoorDyn |
| A Mooring system. More... | |
| class | Point |
| A point for a line endpoint. More... | |
| class | Rod |
| A cylindrical rod. More... | |
| class | Seafloor |
| Bathymetry description for MoorDyn. More... | |
| struct | SeafloorProvider |
| Helper for moordyn::AbstractCurrentKin. More... | |
| class | AbstractCurrentKin |
| An abstract class representing the capability of providing water current data at some point and time. More... | |
| class | AbstractWaveKin |
| An abstract class representing having the capability of providing wave kinematics data. More... | |
| class | SpectrumKinWrapper |
| Wrapper around waves::SpectrumKin to make it adhere to the AbstractWaveKin interface. More... | |
| class | GridXYZT |
| A rectilinear grid with x, y, z, and t axes. More... | |
| class | WaveGrid |
| Contains the data and functionality for the Wave grid kinematics modes. More... | |
| class | CurrentGrid |
| Contains grid based current data. More... | |
| class | Waves |
| Class that handles wave and current kinematics. More... | |
Typedefs | |
| typedef std::shared_ptr< Waves > | WavesRef |
| typedef double | real |
| Real numbers wrapper. It is either double or float. | |
| typedef Eigen::Vector2d | vec2 |
| 2-D vector of real numbers | |
| typedef Eigen::Vector3d | vec3 |
| 3-D vector of real numbers | |
| typedef Eigen::Vector4d | vec4 |
| 4-D vector of real numbers | |
| typedef Eigen::Vector6d | vec6 |
| 6-D vector of real numbers | |
| typedef Eigen::Vector7d | vec7 |
| 7-D vector of real numbers | |
| typedef vec3 | vec |
| vec3 renaming | |
| typedef Eigen::Matrix2d | mat2 |
| 2x2 matrix of real numbers | |
| typedef Eigen::Matrix3d | mat3 |
| 3x3 matrix of real numbers | |
| typedef Eigen::Matrix4d | mat4 |
| 4x4 matrix of real numbers | |
| typedef Eigen::Matrix6d | mat6 |
| 6x6 matrix of real numbers | |
| typedef Eigen::Matrix7d | mat7 |
| 7x7 matrix of real numbers | |
| typedef mat3 | mat |
| mat3 renaming | |
| typedef Eigen::Quaterniond | quaternion |
| Quaternion of real numbers. | |
| typedef Eigen::Matrix< real, Eigen::Dynamic, 1 > | list |
| A resizable list of reals. | |
| typedef Eigen::Vector2i | ivec2 |
| 2-D vector of integers | |
| typedef Eigen::Vector3i | ivec3 |
| 3-D vector of integers | |
| typedef Eigen::Vector4i | ivec4 |
| 4-D vector of integers | |
| typedef Eigen::Vector6i | ivec6 |
| 6-D vector of integers | |
| typedef Eigen::Vector7i | ivec7 |
| 7-D vector of integers | |
| typedef ivec3 | ivec |
| Renaming of ivec3. | |
| typedef std::complex< real > | complex |
| Complex numbers. | |
| typedef Eigen::Matrix< real, Eigen::Dynamic, Eigen::Dynamic > | InstanceStateVar |
| State variables for a particular instance. | |
| typedef Eigen::Block< InstanceStateVar, Eigen::Dynamic > | InstanceStateVarView |
| View of the State variables for a particular instance. | |
| typedef Eigen::Matrix< InstanceStateVar, Eigen::Dynamic, 1 > | StateVar |
| State variable. | |
| typedef Eigen::VectorBlock< StateVar, Eigen::Dynamic > | StateVarView |
| View of the State variable. | |
| typedef int | error_id |
| Error identifier. | |
| typedef struct moordyn::_FailProps | FailProps |
| Failure conditions. | |
| typedef std::shared_ptr< Seafloor > | SeafloorRef |
| Shared pointer. | |
| template<class T > | |
| using | Vec2D = std::vector< std::vector< T > > |
| STL std::vector of 2 dimensions. | |
| template<class T > | |
| using | Vec3D = std::vector< std::vector< std::vector< T > >> |
| STL std::vector of 3 dimensions. | |
| template<class T > | |
| using | Vec4D = std::vector< std::vector< std::vector< std::vector< T > >> > |
| STL std::vector of 4 dimensions. | |
Enumerations | |
| enum | EndPoints { ENDPOINT_A = 0 , ENDPOINT_B = 1 , ENDPOINT_BOTTOM = ENDPOINT_A , ENDPOINT_TOP = ENDPOINT_B } |
| End point qualifiers. More... | |
| enum | seafloor_settings { SEAFLOOR_FLAT = 0 , SEAFLOOR_3D = 1 } |
Functions | |
| std::atomic< size_t > | __instances_counter (0) |
| void | reset_instance_ids () |
| Reset the instances Ids, so they will be assigned again starting from 0. | |
| std::string | log_level_name (int level) |
| Name the log level. More... | |
| template<class T > | |
| MultiStream & | operator<< (MultiStream &st, T val) |
| Streaming to the log file and the terminal. | |
| vec6 | solveMat6 (const mat6 &mat, const vec6 &vec) |
| Solves a 6x6 system of equations M * a = b. More... | |
| mat6 | translateMass (vec r, mat M) |
| Compute the mass matrix on an offset point. More... | |
| mat6 | translateMass6 (vec r, mat6 M) |
| Compute the mass matrix on an offset point. More... | |
| mat6 | rotateMass6 (mat R, mat6 M) |
| rotation to a 6x6 mass/inertia tensor More... | |
| void | transformKinematics (const vec &rRelBody, const mat &M, const vec &r, const vec6 &rd, vec &rOut, vec &rdOut) |
| calculate position and velocity of point based on its position relative to moving 6DOF body More... | |
| std::pair< real, real > | orientationAngles (vec q) |
| Get the spherical angles for a vector. More... | |
| moordyn::real | GetCurvature (moordyn::real length, const vec &q1, const vec &q2) |
| Convenience function to calculate curvature based on adjacent segments' direction vectors and their combined length. More... | |
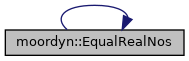
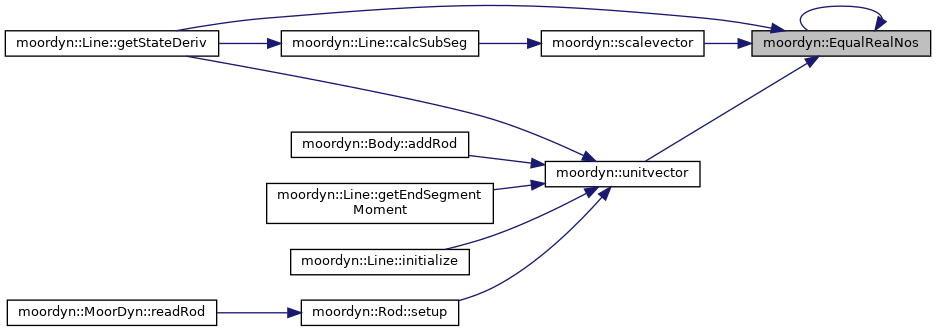
| bool | EqualRealNos (const real a1, const real a2) |
| This function compares two real numbers and determines if they are "almost" equal. More... | |
| vec3 | canonicalEulerAngles (const quaternion &quat, int a0, int a1, int a2) |
| vec3 | Quat2Euler (const quaternion &q) |
| quaternion | Euler2Quat (const vec3 &angles) |
| const complex | i1 (0., 1.) |
| The imaginary unit. | |
| template<typename T > | |
| void | vec2array (const vec &v, T *a) |
| Convert a vector to a C-ish array. More... | |
| template<typename T > | |
| void | array2vec (const T *a, vec &v) |
| Convert a C-ish array to a vector. More... | |
| template<typename T > | |
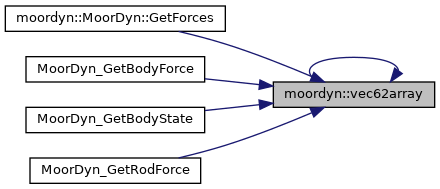
| void | vec62array (const vec6 &v, T *a) |
| Convert a vector to a C-ish array. More... | |
| template<typename T > | |
| void | array2vec6 (const T *a, vec6 &v) |
| Convert a C-ish array to a vector. More... | |
| template<typename T > | |
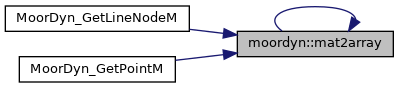
| void | mat2array (const mat &v, T a[3][3]) |
| Convert a matrix to a C-ish array. More... | |
| template<typename T > | |
| void | array2mat (const T a[3][3], mat &v) |
| Convert a C-ish array to a matrix. More... | |
| template<typename T > | |
| void | mat62array (const mat6 &v, T a[6][6]) |
| Convert a matrix to a C-ish array. More... | |
| template<typename T > | |
| void | array2mat6 (const T a[6][6], mat6 &v) |
| Convert a C-ish array to a matrix. More... | |
| template<typename T > | |
| std::vector< T > | vector_slice (std::vector< T > const &v, unsigned int m, unsigned int n) |
| template<typename T > | |
| std::vector< T > | vector_slice (std::vector< T > const &v, unsigned int n) |
| template<typename T > | |
| void | vector_extend (std::vector< T > &v, std::vector< T > const &v_prime) |
| template<typename T , int NROWS, int NCOLS> | |
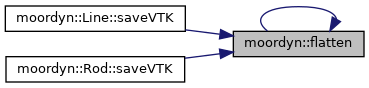
| std::vector< T > | flatten (std::vector< Eigen::Matrix< T, NROWS, NCOLS >> const &v) |
| Flatten a list of vectors or matrices. More... | |
| char | end_point_name (EndPoints p) |
| Gives an character representation of the end point. More... | |
| moordyn::real | unitvector (vec &u, const vec &r1, const vec &r2) |
| Normalized direction vector. More... | |
| template<typename T > | |
| void | scalevector (const vec &u, T newlength, vec &y) |
| Compute a vector with the same direction but different length. More... | |
| mat | getH (vec r) |
| Produce alternator matrix. More... | |
| mat | rotateMass (mat R, mat M) |
| rotation to a 3x3 mass matrix or any other second order tensor More... | |
| mat | RotX (real rads) |
| Rotation matrix around x axis. More... | |
| mat | RotY (real rads) |
| Rotation matrix around y axis. More... | |
| mat | RotZ (real rads) |
| Rotation matrix around z axis. More... | |
| std::atomic< size_t > | __systems_counter (0) |
| real | calcSubSeg (vec p1, vec p2, real surface_height, real diameter) |
| unsigned int | calcInsertIndex (std::vector< real > &list, real value) |
| std::vector< real > | gridAxisCoords (Waves::coordtypes coordtype, vector< string > &entries) |
| Compute the coordinates from a grid definition entry line. More... | |
Variables | |
| null_out_buf | __cnul_buff |
| The buffer to nowhere. More... | |
| std::ostream & | cnul = __cnul |
| const real | pi = 3.141592653589793238462643383279502884197169399375105820974944 |
| Pi constant. | |
| const real | rad2deg = 180.0 / pi |
| Constant to convert radians into degrees. | |
| const real | deg2rad = pi / 180.0 |
| Constant to convert degrees into radians. | |
| const char * | UnitList [] |
| The list of units for the output. More... | |
Detailed Description
MoorDyn2 C++ API namespace.
Typedef Documentation
◆ WavesRef
| typedef std::shared_ptr< Waves > moordyn::WavesRef |
Renaming the shared pointer to be a little more ergonomic
Enumeration Type Documentation
◆ EndPoints
| enum moordyn::EndPoints |
Function Documentation
◆ array2mat()
|
inline |
Convert a C-ish array to a matrix.
- Parameters
-
a The input array v The output matrix


◆ array2mat6()
|
inline |
Convert a C-ish array to a matrix.
- Parameters
-
a The input array v The output matrix


◆ array2vec()
|
inline |
Convert a C-ish array to a vector.
- Parameters
-
a The input array v The output vector

◆ array2vec6()
|
inline |
Convert a C-ish array to a vector.
- Parameters
-
a The input array v The output vector

◆ end_point_name()
|
inline |
Gives an character representation of the end point.
- Returns
- The endpoint char
◆ EqualRealNos()
This function compares two real numbers and determines if they are "almost" equal.
"almost" equal means equal within some relative tolerance (basically ignoring the last 2 significant digits) (see "Safe Comparisons" suggestion from http://www.lahey.com/float.htm)
- Parameters
-
a1 The first real number to compare a2 The second real number to compare
- Returns
- true if and only if the numbers are almost equal, false otherwise
- Note
- The numbers are added together in this routine, so overflow can result if comparing two "huge" numbers.
- Use this function instead of directly calling a specific routine in the generic interface.
◆ flatten()
| std::vector<T> moordyn::flatten | ( | std::vector< Eigen::Matrix< T, NROWS, NCOLS >> const & | v | ) |
Flatten a list of vectors or matrices.
This function produced a flattened version ready for saving on VTK arrays
- Parameters
-
v The list of vectors or matrices
- Returns
- The flattened list of values

◆ gridAxisCoords()
| std::vector< real > moordyn::gridAxisCoords | ( | Waves::coordtypes | coordtype, |
| vector< string > & | entries | ||
| ) |
Compute the coordinates from a grid definition entry line.
- Parameters
-
coordtype The type of coordinates input entries Nothing if coordtypeis 0; the list of coordinates ifcoordtypeis 1 and minimum limit; the maximum limit and the number of points ifcoordtypeis 2
- Returns
- The list of coordinates
- Warning
- Memory will be allocated in coordarray. The user is responsible of deallocating it afterwards


◆ log_level_name()
| std::string moordyn::log_level_name | ( | int | level | ) |
◆ mat2array()
|
inline |
Convert a matrix to a C-ish array.
- Parameters
-
v The input matrix a The output array

◆ mat62array()
|
inline |
Convert a matrix to a C-ish array.
- Parameters
-
v The input matrix a The output array

◆ solveMat6()
Solves a 6x6 system of equations M * a = b.
Uses Eigen::ColPivHouseholderQR which means it doesn't have any particular constraints on the matrix properties. Has high accuracy and good speed.
- Parameters
-
mat 6x6 Matrix (M in M * a = b) vec 6x1 Vector (b in M * a = b)
- Returns
- vec6 Resulting solution (a in M * a = b)
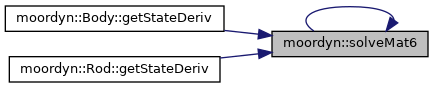
◆ vec2array()
|
inline |
Convert a vector to a C-ish array.
- Parameters
-
v The input vector a The output array

◆ vec62array()
|
inline |
Convert a vector to a C-ish array.
- Parameters
-
v The input vector a The output array

◆ vector_extend()
| void moordyn::vector_extend | ( | std::vector< T > & | v, |
| std::vector< T > const & | v_prime | ||
| ) |
Extend a C++ vector
- Parameters
-
v The vector to slice v_prime The vector to be concatenated

◆ vector_slice() [1/2]
| std::vector<T> moordyn::vector_slice | ( | std::vector< T > const & | v, |
| unsigned int | m, | ||
| unsigned int | n | ||
| ) |
Slice a C++ vector
- Parameters
-
v The vector to slice m The first element to consider n The number of elements
- Returns
- The sliced vector


◆ vector_slice() [2/2]
| std::vector<T> moordyn::vector_slice | ( | std::vector< T > const & | v, |
| unsigned int | n | ||
| ) |
Slice a C++ vector
- Parameters
-
v The vector to slice n The number of elements
- Returns
- The sliced vector

Variable Documentation
◆ __cnul_buff
| std::ostream __cnul & moordyn::__cnul_buff |
The buffer to nowhere.
Stream to nowhere.
◆ cnul
| std::ostream& moordyn::cnul = __cnul |
Stream to nowhere, used when verbosity is not large enough to print the message
◆ UnitList
| const char* moordyn::UnitList[] |
The list of units for the output.